수학(mathematics)에서, 직교 좌표(orthogonal coordinates)는 좌표 초표면(coordinate hypersurfaces)이 모두 직각으로 만나는 d 좌표
Motivation
벡터 연산과 물리 법칙은 통상적으로 데카르트 좌표(Cartesian coordinates)에서 유도하기 가장 쉽고, 반면에 비-데카르트 직교 좌표는 종종 다양한 문제, 특히 양자 역학, 유체 흐름, 전기역학, 플라즈마 물리학 및 화학종 또는 열의 확산의 분야 이론에서 발생하는 그것들과 같은 경계 값 문제(boundary value problems)의 해결을 위해 대신 사용됩니다.
비-데카르트 좌표의 가장 큰 장점은 그것들이 문제의 대칭과 일치하도록 선택될 수 있다는 것입니다. 예를 들어, 지면 (또는 다른 장벽)에서 멀리 떨어진 폭발로 인한 압력 파동은 데카르트 좌표에서 3D 공간에 의존하며, 어쨌든 압력은 주로 중심에서 멀어지므로, 구형 좌표(spherical coordinates)에서 문제는 거의 1차원에 가깝습니다 (왜냐하면 압력 파동은 주로 시간과 중심으로부터의 거리에만 의존하기 때문입니다). 또 다른 예제는 곧은 원형 파이프의 (느린) 유체입니다: 데카르트 좌표에서, 부분 미분 방정식을 포함하는 (어려운) 2차원 경계 값 문제를 해결해야 하지만, 원통형 좌표(cylindrical coordinates)에서 그 문제는 부분 미분 방정식(partial differential equation) 대신 보통의 미분 방정식(ordinary differential equation)을 갖는 1차원이 됩니다.
일반적인 곡선 좌표(curvilinear coordinates) 대신 직교 좌표를 선호하는 이유는 단순성 때문입니다: 좌표가 직교가 아닐 때 많은 문제가 발생합니다. 예를 들어, 직교 좌표에서 많은 문제는 변수의 분리(separation of variables)에 의해 해결될 수 있습니다. 변수의 분리는 복잡한 d-차원 문제를 알려진 함수의 관점에서 풀 수 있는 d 일-차원 문제로 변환하는 수학적 기법입니다. 많은 방정식은 라플라스의 방정식(Laplace's equation) 또는 헬름홀츠 방정식(Helmholtz equation)으로 축소될 수 있습니다. 라플라스의 방정식은 13개의 직교 좌표 시스템 (아래 테이블에 토러스적의 예외를 갖는 14개)로 분리할 수 있고, 헬름홀츠 방정식은 11개의 직교 좌표 시스템으로 분리할 수 있습니다.
직교 좌표는 그것들의 메트릭 텐서(metric tensor)에 비-대각 항을 가지지 않습니다. 다시 말해서, 무한소 제곱 거리
여기서 d는 차원이고 다음과 같은 스케일일 함수 (또는 스케일 인수)는:
메트릭 텐서의 대각성 구성 요소의 제곱근 또는 아래에 설명된 지역적 기저 벡터
직교 좌표 시스템을 2차원에서 생성하는 간단한 방법은 데카르트 좌표(Cartesian coordinates) (x, y)의 표준 2차원 격자를 등각 매핑(conformal mapping)에 의한 것입니다. 복소수 z = x + iy는 실수 좌표 x와 y에서 형성될 수 있으며, 여기서 i는 허수 단위(imaginary unit)를 나타냅니다. 비-영 복소수 도함수를 갖는 임의의 정칙 함수 w = f(z)는 등각 매핑(conformal mapping)을 생성할 것입니다; 만약 결과 복소수가 w = u + iv로 쓰이면, 상수 u와 v의 곡선은 상수 x와 y의 원래 직선이 그랬던 것과 마찬가지로 직각에서 교차합니다.
3차원 이상에서 직교 좌표는 직교 2-차원 좌표 시스템을 새로운 차원 (원통형 좌표)으로 투영함으로써 또는 대칭 축 중 하나를 기준으로 2차원 시스템을 회전함으로써 생성될 수 있습니다. 어쨌든, 타원면체 좌표(ellipsoidal coordinates)와 같이 2차원 시스템을 투영하거나 회전함으로써 얻을 수 없는 3차원에서 다른 직교 좌표 시스템이 있습니다. 보다 일반적인 직교 좌표는 일부 필요한 좌표 표면으로 시작하고 직교 궤적(orthogonal trajectories)을 고려함으로써 얻을 수 있습니다.
Basis vectors
Covariant basis
데카르트 좌표(Cartesian coordinates)에서, 기저 벡터(basis vectors)는 고정된 것 (상수)입니다. 곡선 좌표(curvilinear coordinates)의 보다 일반적인 설정에서, 공간에서 한 점은 좌표에 의해 지정되고, 모든 각 그러한 점에서 일반적으로 상수가 아닌 기저 벡터의 집합이 경계가 있습니다: 이것은 일반적으로 곡선 좌표의 본질이고 매우 중요한 개념입니다. 직교 좌표를 구별하는 것은, 기저 벡터가 다양하지만, 항상 서로에 관해 직교(orthogonal)한다는 것입니다. 다시 말해서,
이들 기저 벡터는 정의에 의해 하나의 좌표를 변경하고 다른 좌표를 고정되게 유지함으로써 얻은 곡선의 접 벡터(tangent vectors)입니다:
여기서 r은 어떤 점이고
벡터가 반드시 같은 길이일 필요는 없음에 주목하십시오. 좌표의 스케일 인수로 알려진 유용한 함수는 단순히 기저 벡터
정규화된 기저 벡터는 모자로 표시되고 길이로 나누어 얻습니다:
벡터 필드(vector field)는 기저 벡터 또는 정규화된 기저 벡터에 관한 구성 요소에 의해 지정될 수 있고, 어떤 경우를 의미하는지 확인해야 합니다. 정규화된 기저에서 구성 요소는 양의 명확성을 위해 응용에서 가장 공통적입니다 (예를 들어, 접선 속도에 스케일 인수를 곱하는 대신 접선 속도를 처리하고자 할 수 있습니다). 파생에서 정규화된 기저는 더 복잡하기 때문에 덜 공통적입니다.
Contravariant basis
위에 표시된 기저 벡터는 공변(covariant) 기저 벡터입니다 (왜냐하면 그것들은 벡터와 "공통-변하기" 때문입니다). 직교 좌표의 경우에서, 반변 기저 벡터는 공변 벡터와 같은 방향에 있지만 역수 길이(reciprocal length)이므로 쉽게 찾을 수 있습니다. (이러한 이유로, 기저 벡터의 두 집합은 서로에 관해 역수라고 말합니다):
이것은, 정의에 의해, 크로네커 델타(Kronecker delta)를 사용하여
우리는 이제 직교 좌표에서 벡터를 설명하기 위해 공통적으로 사용되는 세 가지 다른 기저 집합: 공변 기저
혼동을 피하기 위해,
인덱스의 위치는 구성 요소가 계산되는 방법을 나타냅니다 (위쪽 인덱스는 지수화와 혼동해서는 안 됩니다). 모든 기저 벡터 (i = 1, 2, ..., d)에 걸쳐 합을 나타내는 합계 기호 Σ (대문자 시그마)와 합계 범위는 종종 생략됩니다. 구성 요소는 다음과 같이 간단하게 관련됩니다:
정규화된 기저에 관해 벡터 구성 요소에 사용되는 구별되는 광범위한 표기법이 없습니다; 이 기사에서 벡터 구성 요소에 위첨자를 사용하고 구성 요소가 정규화된 기저로 계산된다는 점에 유의하십시오.
Vector algebra
벡터 덧셈과 부정은 복잡하지 않은 데카르트 좌표에서와 같이 성분-별로 수행됩니다. 여분의 고려 사항이 벡터 연산에 대해 필요할 수 있습니다.
어쨌든, 모든 이들 연산은 벡터 필드(vector field)에서 두 벡터가 같은 점에 경계져 있다고 가정합니다 (다시 말해서, 벡터의 꼬리가 일치합니다). 기저 벡터는 일반적으로 직교 좌표에서 다르기 때문에, 두 벡터가 그 성분이 공간의 다른 점에서 계산되도록 더해지면, 서로 다른 기저 벡터가 고려되어야 합니다.
Dot product
데카르트 좌표 (직교정규 기저 집합을 갖는 유클리드 공간)에서 점 곱은 단순히 성분의 곱의 합입니다. 직교 좌표에서, 두 벡터 x와 y의 점 곱은 벡터의 성분이 정규화된 기저에서 계산될 때 다음과 같은 친숙한 형식을 취합니다:
이것은 어떤 점에서 정규화된 기저가 데카르트 좌표 시스템을 형성할 수 있다는 사실의 즉각적인 결과입니다: 기저 집합은 직교정규(orthonormal)입니다.
공변 또는 반변 기저에 있는 성분에 대해,
이것은 벡터를 성분 형식으로 쓰고, 기저 벡터를 정규화하고, 점 곱을 취함으로써 쉽게 도출될 수 있습니다. 예를 들어, 2D에서:
여기서 정규화된 공변 및 반변 기저가 같다는 사실이 사용되어 왔습니다.
Cross product
3D 데카르트 좌표에서 교차 곱(cross product)은 다음과 같습니다:
위의 공식은 그런-다음 구성 요소가 정규화된 기저에서 계산되면 직교 좌표에서 유효하게 남습니다.
공변 또는 반변 기저를 갖는 직교 좌표에서 교차 곱을 구성하기 위해, 다시 기저 벡터를 정규화해야 합니다. 예를 들면 다음과 같습니다:
이는 전개해서 다음과 같습니다:
비-직교 좌표와 더 높은 차원에 대한 일반화를 단순화하는 교차 곱에 대한 간결한 표기는 레비-치비타 텐서(Levi-Civita tensor)를 사용하여 가능하며, 이는 스케일 인수가 모두 1이 아니면 0과 1 이외의 성분을 가질 것입니다.
Vector calculus
Differentiation
어떤 점에서 무한소 변위를 보면, 다음임에 명백합니다:
정의(definition)에 의해, 함수의 그래디언트는 만족해야 합니다 (이 정의는 ƒ가 임의의 텐서이면 참으로 남습니다)
따라서 델 연산자(del operator)는 다음과 같아야 합니다:
그리고 이것은 일반적인 곡선 좌표에서 참으로 남아 있습니다. 그래디언트(gradient)와 라플라스(Laplacian)와 같은 수량은 이 연산자의 적절한 적용을 따릅니다.
Basis vector formulae
dr 및 정규화된 기저 벡터

여기서 다음은
야코비 행렬식(Jacobian determinant)이며, 이는 직교 좌표에서 무한소 입방체 dxdydz에서 무한소 곡선 부피까지의 부피에서 변형의 기하학적 해석을 가집니다.
Integration
위에 표시된 직선 원소를 사용하여, 벡터 F의 경로
하나의 좌표
유사하게, 부피 원소는 다음과 같습니다:
여기서 큰 기호
예제로서, 3D에서
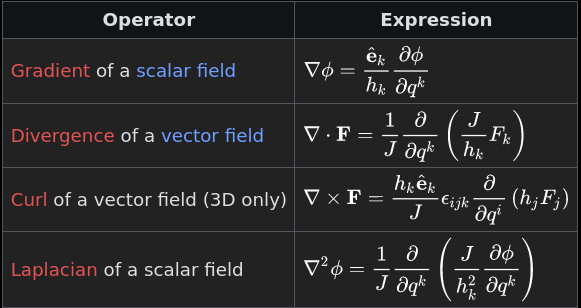
Differential operators in three dimensions
이들 연산은 응용에서 공통적이기 때문에, 이 섹션에서 모든 벡터 성분은 정규화된 기저:
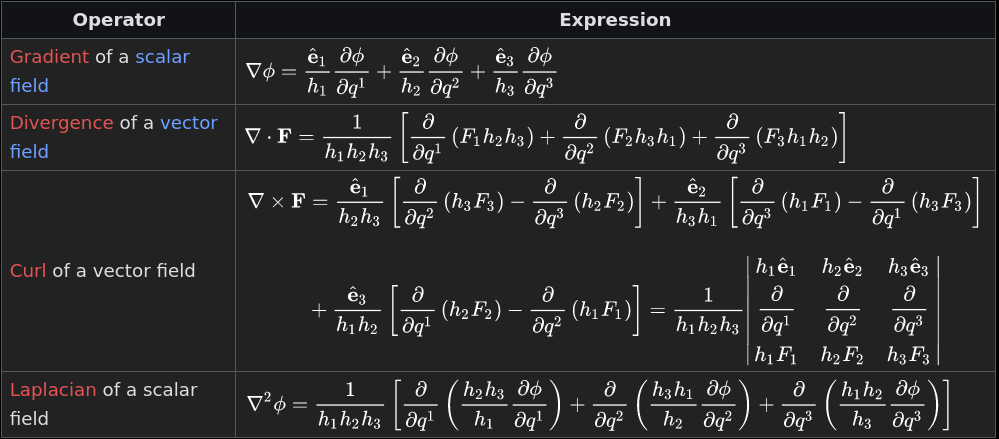
위의 표현식은 [[Levi-Civita symbol|레비-치비타 기호(Levi-Civita symbol)]]
역시 스칼라 필드의 그래디언트는 다음과 같은 정식의 부분 도함수를 포함하는 야코비 행렬(Jacobian matrix) J의 관점에서 표현될 수 있습니다:
이때, 다음과 같은 기저의 변경(change of basis)에 있습니다:
여기서 회전과 스케일링 행렬은 다음과 같습니다:
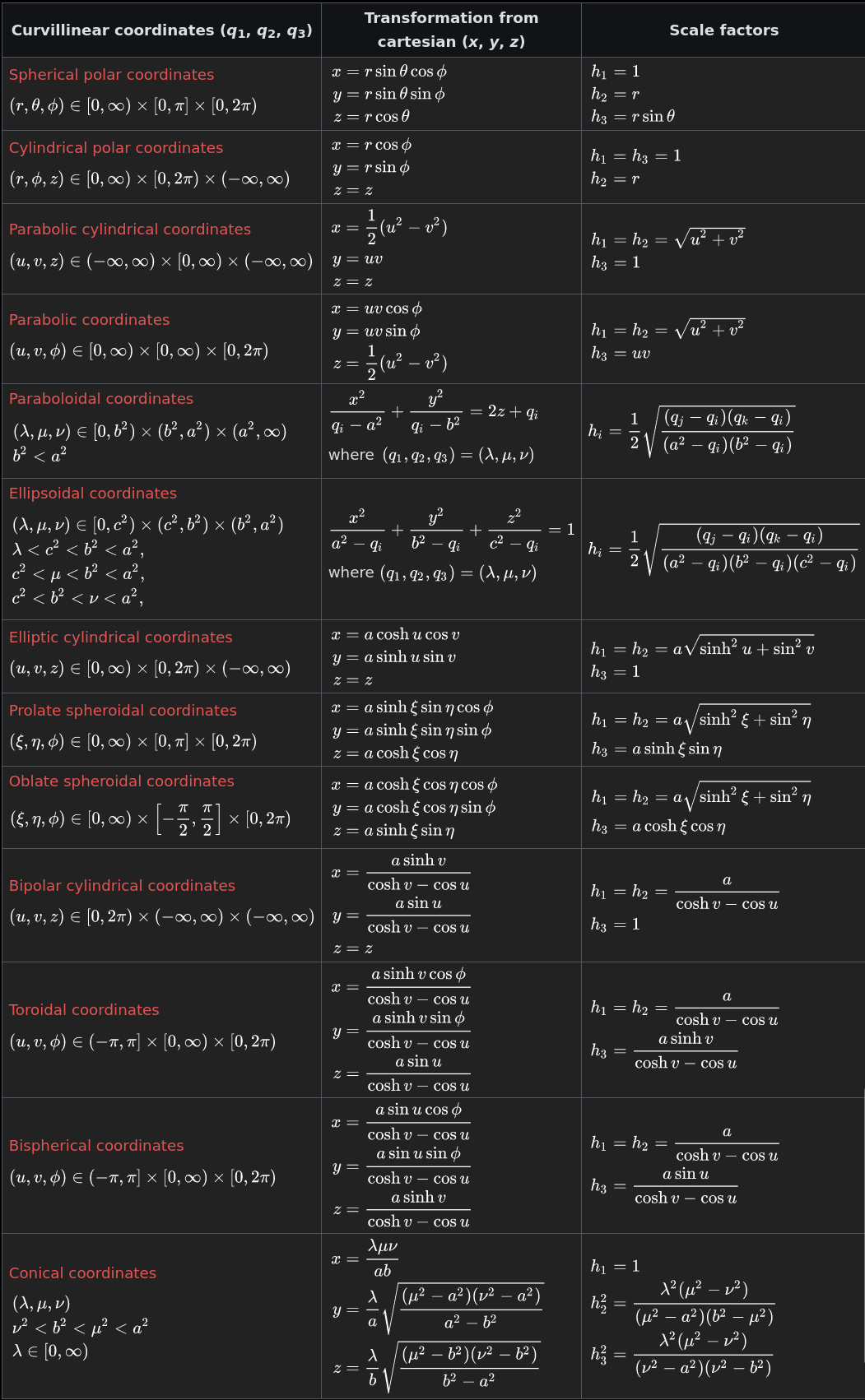
Table of orthogonal coordinates
보통의 데카르트 좌표 외에도, 몇 가지 다른 좌표가 아래에 테이블로 정리되어 있습니다. 좌표 열에서 컴팩트성을 위해 구간 표기법(Interval notation)이 사용됩니다.
See also
References
- Korn GA and Korn TM. (1961) Mathematical Handbook for Scientists and Engineers, McGraw-Hill, pp. 164–182.
- Morse and Feshbach (1953). "Methods of Theoretical Physics, Volume 1". McGraw-Hill. {{cite journal}}: Cite journal requires |journal= (help)
- Margenau H. and Murphy GM. (1956) The Mathematics of Physics and Chemistry, 2nd. ed., Van Nostrand, pp. 172–192.
- Leonid P. Lebedev and Michael J. Cloud (2003) Tensor Analysis, pp. 81 – 88.
