수학(mathematics)에서, 역 삼각 함수 (때때로 역시 arcus functions, antitrigonometric functions 또는 cyclometric functions라고 불림)는 (적절하게 제한된 도메인(domain)을 갖는) 삼각 함수(trigonometric functions)의 역 함수(inverse function)입니다. 구체적으로 특별히, 그것들은 사인(sine), 코사인(cosine), 탄젠트(tangent), 코탄젠트(cotangent), 시컨트(secant), 및 코시컨트(cosecant) 함수의 역함수이고, 각도의 삼각 비율 중 임의의 것에서 각도를 얻기 위해 사용됩니다. 역 삼각 함수는 공학(engineering), 항해(navigation), 물리학(physics), 및 기하학(geometry)에서 널리 사용됩니다.
Notation
역 삼각 함수에 대해 몇 가지 표기법이 존재합니다. 가장 공통적인 관례는 arc- 접두사를 사용하여: arcsin(x), arccos(x), arctan(x), 등의 역 삼각 함수의 이름을 지정하는 것입니다. (이 관례는 이 기사 전체에서 사용됩니다.) 이 표기법은 다음 기하학적 관계에서 발생합니다: 라디안에서 측정할 때, θ 라디안의 각도는 그것의 길이가 rθ인 호에 해당할 것이며, 여기서 r은 원의 반지름입니다. 따라서 단위 원(unit circle)에서, "그것의 코사인이 x인 호"는 "그것의 코사인이 x인 각도"와 같은데, 왜냐하면 반지름에서 원호의 길이가 라디안에서 각도의 측정과 같기 때문입니다. 컴퓨터 프로그래밍 언어에서, 역 삼각 함수는 종종 asin, acos, atan의 축약형으로 호출됩니다.
1813년 존 허셜(John Herschel)에 의해 도입된, 표기법
따라서, 2009년 이래로, ISO 80000-2 표준은 역함수에 대해 "arc" 접두사만 지정해 왔습니다.
Basic concepts
Principal values
여섯 삼각 함수의 어떤 것도 일-대-일(one-to-one)이 아니기 때문에, 그것들은 역 함수를 가지기 위해 제한되어야 합니다. 그러므로, 역 함수의 결과 치역(range)은 원래 함수의 도메인의 적절한 (즉, 엄격한) 부분집합(subset)입니다.
예를 들어, 제곱근(square root) 함수
주요 역은 다음 테이블에 나열됩니다.

주목: 일부 저자는 아크시컨트의 치역을
만약
아래 테이블은 역삼각 함수의 이름과 도메인을 라디안(radians)에서 보통의 주요 값(principal value)의 치역(range)과 함께 표시합니다.
기호
기호
코탄젠트
다시 말해서,
도메인에 있지 않는 이들 점 (정수
탄젠트
여기서
다시 말해서,
Solutions to elementary trigonometric equations
각 삼각 함수는 그것의 인수의 실수 부분에서 주기적이며,
- 사인과 코시컨트는
- 코사인과 시컨트는
- 탄젠트는
- 코탄젠트는
이 주기성은
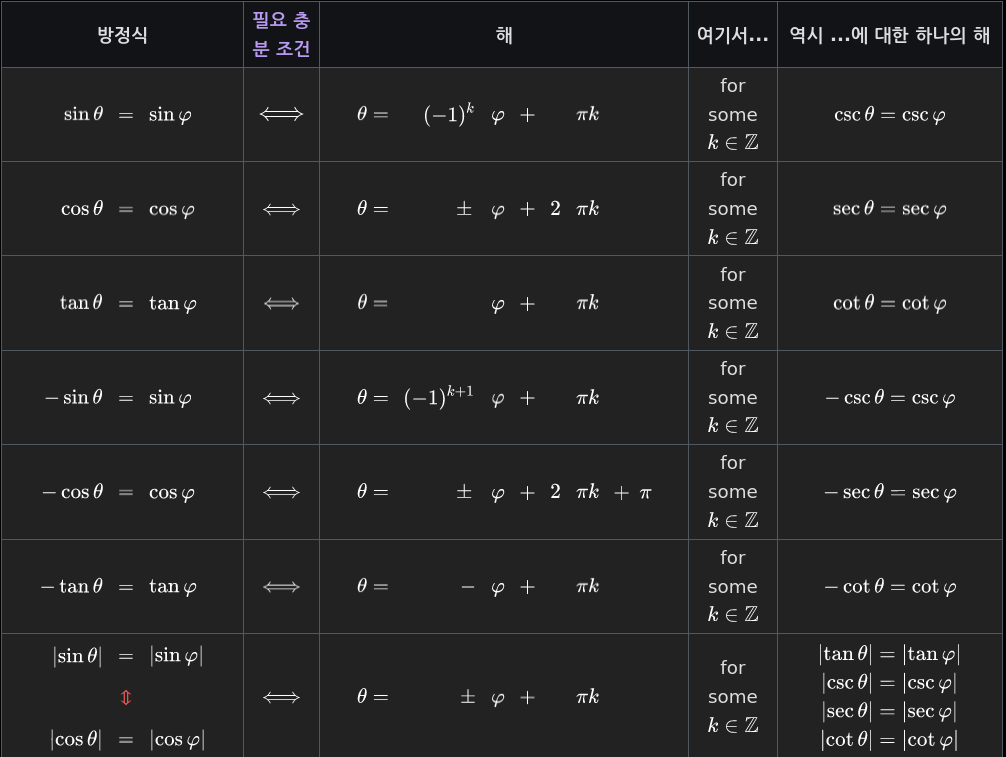
다음 테이블은 역 삼각 함수가 여섯 표준 삼각 함수와 관련된 상등을 풀기 위해 사용될 수 있는 방법을 보여줍니다.
주어진 값
기호
예를 들어, 만약
"더하기 또는 빼기" 기호
우리는
만약
다음 명제로 축약됩니다:
어느 쪽도
- 또는 그렇지 않으면
그리고 게다가, 이 특정 경우에서
이것은
방정식 변환하기
위의 방정식은 반사와 이동 항등식을 사용함으로써 변환될 수 있습니다:
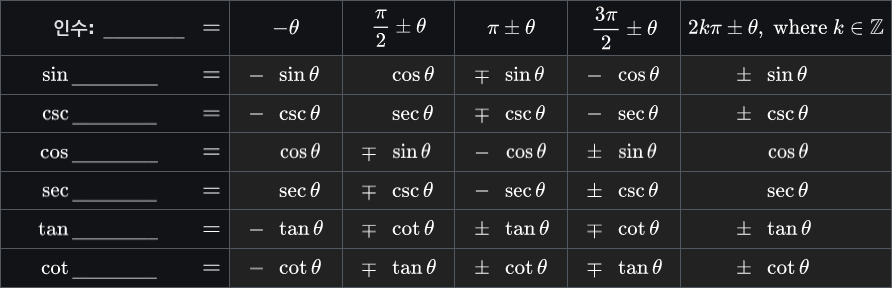
이들 공식은, 특히, 다음이 유지됨을 의미합니다:
여기서
따라서 예를 들어, 상등
여기서
치환
Equal identical trigonometric functions
Equal identical trigonometric functions
아래 테이블은 두 각도
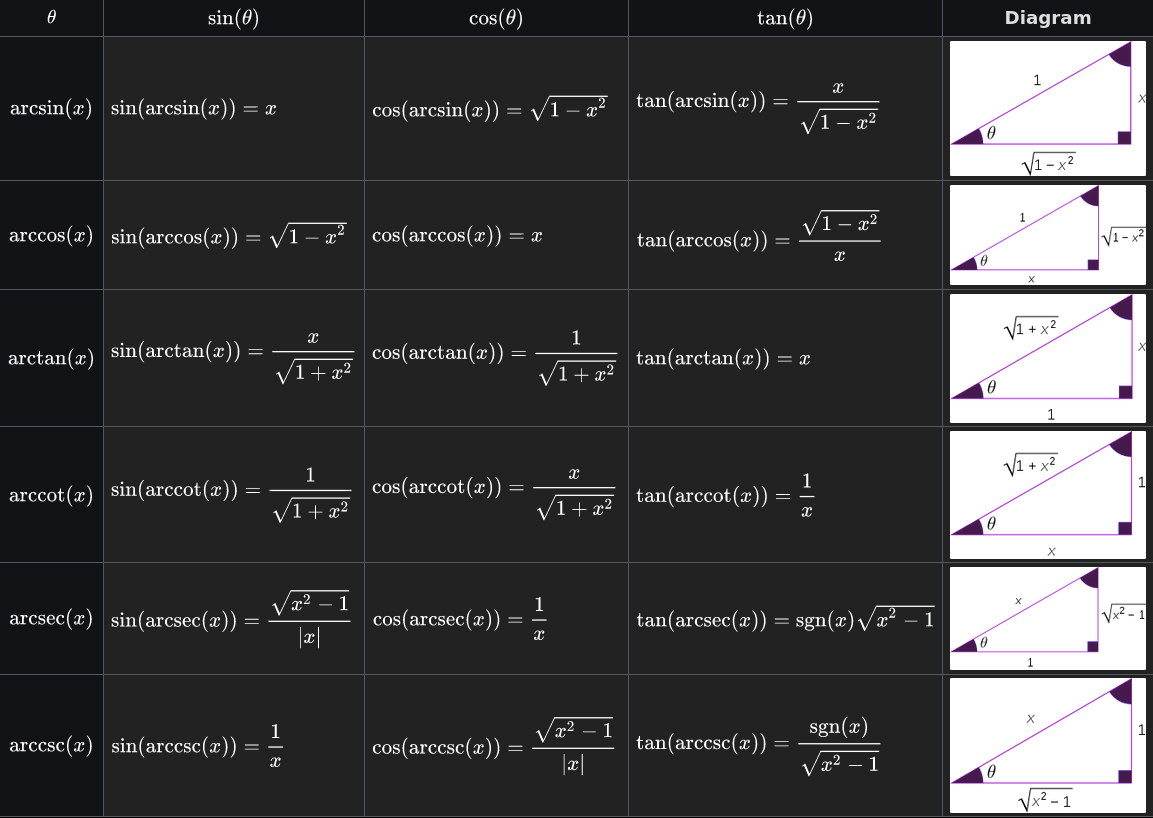
Relationships between trigonometric functions and inverse trigonometric functions
역 삼각 함수의 삼각 함수는 아래 테이블에 정리되어 있습니다. 그것들을 유도하기 위한 빠른 방법은 길이 1의 한 변과 또 다른 변의 길이
Relationships among the inverse trigonometric functions
보충 각도:
음의 인수:
역수 인수:
만약 하나가 오직 사인 테이블의 조각을 가지면 유용한 항등식:
복소수의 제곱근이 여기에서 사용될 때마다, 우리는 양의 실수 부분 (또는 만약 제곱이 음의 실수이면 양의 허수 부분)을 갖는 근을 선택합니다.
위의 테이블에서 바로 뒤따르는 유용한 형식은 다음과 같습니다:
그것은
절반-각도 공식(half-angle formula),
Arctangent addition formula
이것은 탄젠트 덧셈 공식(addition formula)에서 다음을 설정함으로써,
다음이 유도됩니다:
In calculus
Derivatives of inverse trigonometric functions
z의 복소수 값에 대해 도함수(derivative)는 다음과 같습니다:
오직 x의 실수 값에 대해:
견본 도함수에 대해: 만약
Expression as definite integrals
도함수를 적분하고 값을 한 점에 고정하면 역 삼각 함수에 대해 표현을 정적분으로 제공합니다:
x가 1과 같을 때, 제한된 도메인을 갖는 적분은 부적절한 적분(improper integral)이지만, 여전히 잘-정의된 것입니다.
Infinite series
사인과 코사인 함수와 유사하게, 역 삼각 함수는 역시 다음처럼 거듭제곱 급수(power series)를 사용하여 계산될 수 있습니다. 아크사인에 대해, 그 급수는 그것의 도함수,
다른 역 삼각 함수에 대해 급수는 위에 주어진 관계에 따라 이들의 관점에서 제공될 수 있습니다. 예를 들어,
레온하르트 오일러(Leonhard Euler)는 그것의 테일러 급수(Taylor series)보다 더 빠르게 수렴하는 아크탄젠트에 대해 급수를 발견했습니다:
((합에서 n = 0에 대해 항은 빈 곱(empty product)이므로, 1입니다.)
대안적으로, 이것은 다음으로 표현될 수 있습니다:
아크탄젠트 함수에 대해 또 다른 급수는 다음에 의해 제공됩니다:
여기서
Continued fractions for arctangent
아크탄젠트에 대해 거듭제곱 급수에 대한 두 가지 대안은 다음과 같은 이들 일반화된 연속된 분수(generalized continued fraction)입니다:
이것들 중 두 번째는 절단된 복소 평면에서 유효합니다. −i에서 무한대에서 점까지 허수 축을 따라 내려가는 자름과 i에서 무한대에서 점까지 같은 축을 따라 올라가는 둘의 자름이 있습니다. 그것은 −1에서 1까지 실행하는 실수에 대해 가장 잘 작동합니다. 부분 분모는 홀수 자연수이고, 부분 분자 (첫 번째 뒤)는 단지
Indefinite integrals of inverse trigonometric functions
z의 실수와 복소수 값에 대해:
실수 x ≥ 1에 대해:
−1과 1 사이가 아닌 모든 실수 x에 대해:
절댓값은 아크시컨트와 아크코시컨트 함수의 음수와 양수 값 둘 다에 대해 보상하기 위해 필요됩니다. 시그넘 함수는 역시 x의 양수와 음수 값에 대해 둘의 다른 해를 생성하는 두 함수의 도함수(derivative)에서 절댓값으로 인해 필요됩니다. 이것들은 역 쌍곡선 함수(inverse hyperbolic function)의 로그 정의를 사용하여 더 단순화될 수 있습니다:
arcosh 함수의 인수에 있는 절댓값은 그것의 그래프의 음의 절반을 생성하여, 위에 표시된 시그넘 로그 함수와 동일하게 만듭니다.
모든 이들 역도함수는 위에 표시된 부분에 의한 적분(integration by parts)과 간단한 도함수 형식을 사용하여 유도될 수 있습니다.
Example
그런-다음
이것은 간단한 치환(substitution)
Extension to complex plane
역 삼각 함수는 해석적 함수(analytic function)이기 때문에, 그것들은 실수 직선에서 복소 평면으로 확장될 수 있습니다. 이것은 여러 판(sheet)과 가지 점(branch point)을 갖는 함수를 초래합니다. 확장을 정의하는 한 가지 가능한 방법은 다음과 같습니다:
여기서 가지 점 (−i와 +i) 사이에 엄격하게 놓이지 않는 허수 축의 부분은 주요 판과 다른 판 사이의 가지 절단(branch cut)입니다. 적분의 경로는 가지 절단을 가로지르지 않아야 합니다. 가지 절단 위가 아닌 z에 대해, 0에서 z까지의 직선 경로가 그러한 하나의 경로입니다. 가지 절단 위에 z에 대해, 그 경로는 위쪽 가지 절단에 대해 Re[x] > 0에서 및 아래쪽 가지 절단에 대해 Re[x] < 0에서 접근해야 합니다.
아크사인 함수는 그런-다음 다음처럼 정의될 수 있습니다:
여기서 (제곱근 함수는 음의 실수 축을 따라 그것의 절단을 가지고) −1과 +1 사이에 엄격하게 놓이지 않는 실수 축의 부분은 아크사인의 주요 판과 다른 판 사이의 가지 절단입니다;
이것은 다음처럼 같은 절단을 가집니다;
이것은 아크탄젠트처럼 같은 절단을 가집니다;
여기서 –1과 +1 포함한 사이의 실수 축의 부분은 아크시컨트의 주요 판과 다른 판 사이의 절단입니다;
이것은 아크시컨트와 같은 절단을 가집니다:
Logarithmic forms
이들 함수는 역시 복소 로그(complex logarithm)를 사용하여 표현될 수 있습니다. 이것은 자연스러운 방식에서 복소 평면(complex plane)으로 그것들 도메인(domains)을 확장합니다. 함수의 주요 값에 대해 다음 항등식은 그것들의 가지 자름에서도 정의된 모든 곳에서 유지됩니다.
Generalization
역 삼각 함수 모두는 직각삼각형의 각도를 출력하기 때문에, 그것들은 오일러의 공식(Euler's formula)을 사용함으로써 복소평면에서 직각 삼각형을 형성하기 위해 일반화될 수 있습니다. 대수적으로 이것은 우리에게 다음을 제공합니다. 대수적으로, 이것은 다음을 제공합니다:
또는
여기서
또는
단순히 허수 부분을 취하면 임의의 실수-값
아래 테이블은 각 역 삼각 함수에 대해, a, b, 및 c의 값과 위의 방정식에 값을 대입하고 단순화한 결과인
이런 의미에서, 모든 역 삼각 함수는 복소-값 로그 함수의 특정한 경우로 생각될 수 있습니다. 이 정의는 임의의 복소-값
Example proof
사인의 지수 정의(exponential definition of sine)를 사용하여, 다음을 얻습니다:
다음으로 놓습니다:
(양의 가지가 선택됩니다)
Applications
Finding the angle of a right triangle
역 삼각 함수는 삼각형의 변의 길이가 알려져 있을 때 직각 삼각형(right triangle)의 남아있는 두 각도를 결정하려고 시도할 때 유용합니다. 사인과 코사인의 직각 삼각형 정의를 상기하면, 그것은 다음임을 따릅니다:
종종, 빗변은 알려져 있지 않고 피타고라스 정리(Pythagorean Theorem):
예를 들어, 지붕이 20피트 밖으로 나가면서 8피트가 떨어진다고 가정합니다. 지붕은 수평과 각도 θ를 만들며, 여기서 θ는 다음과 같이 계산될 수 있습니다:
In computer science and engineering
Two-argument variant of arctangent
둘의 인수를 갖는 atan2 함수는 y와 x가 주어지지만, (−π, π]의 범위를 갖는 y / x의 아크탄젠트를 계산합니다. 다시 말해서, atan2(y, x)는 평면의 양의 x-축과 그것 위에 점 (x, y) 사이의 각도이며, 반시계방향 각도 (위쪽 반-평면, y > 0)에 대해 양의 부호와 시계방향 각도 (아래쪽 반-평면, y < 0)에 대해 음의 기호를 가집니다. 그것은 많은 컴퓨터 프로그래밍 언어에서 처음 도입되었지만, 그것은 역시 이제 과학과 공학의 다른 분야에서 공통적입니다.
표준 아크탄젠트 함수의 관점에서, 그것은
그것은 역시 복소수(complex number) x + iy의 편각(argument)의 주요 값(principal value)과 같습니다.
위 함수의 이 제한된 버전은 역시 다음과 같이 탄젠트 절반-각도 공식(tangent half-angle formula)을 사용하여 정의될 수 있습니다:
x > 0 또는 y ≠ 0 중 하나라는 조건에서 그렇습니다. 어쨌든, 이것은 x ≤ 0 및 y = 0가 주어지면 실패하므로 표현식이 계산 사용에 적합하지 않습니다.
위의 편각 순서 (y, x)가 가장 공통적으로 보이고, 특히 C 프로그래밍 언어와 같은 ISO 표준에서 사용되지만, 일부 저자는 반대 관례 (x, y)을 사용할 수 있으므로 약간의 주의가 필요합니다. 이들 변형은 atan2에 자세히 설명되어 있습니다.
Arctangent function with location parameter
많은 응용에서, 방정식
함수
Numerical accuracy
0과 π에 가까운 각도에 대해, 아크코사인은 나쁜-조건된(ill-conditioned) 것이고 따라서 (제한된 자릿수의 숫자로 인해) 컴퓨터 구현에서 감소된 정확도를 갖는 각도를 계산할 것입니다. 유사하게, 아크사인은 −π/2와 π/2에 가까운 각도에 대해 부정확합니다.
See also
External links

